
Reference platform

Building on top of the I-MECH architecture, the IMOCO4.E architecture is enhanced with Layer 4 - Supervisory control within which methodologies such us Digital Twins, Servitization concepts, AI/data analytics will be implemented across all layers. Additional focus will be given also on
- HW/SW performance;
- System behaviour;
- Edge processing/intelligence;
- Navigation/path planning;
- Cybersecurity;
- Decision making, and
- Model-based systems engineering.
IMOCO4.E combines and exploits novel sensory information, model-based approaches and Industrial Internet-of-Things philosophies to make mechatronic systems smarter, more configurable, more reliable and faster while simultaneously pushing their performance toward physical limits. From a long-term viewpoint, IMOCO4.E will utilize digital twins to optimize machines over their full lifecycles. In this framework, IMOCO4.E will achieve its goals through 10 Building Blocks (BBs), 5 Pilots and 4 Demonstrators.
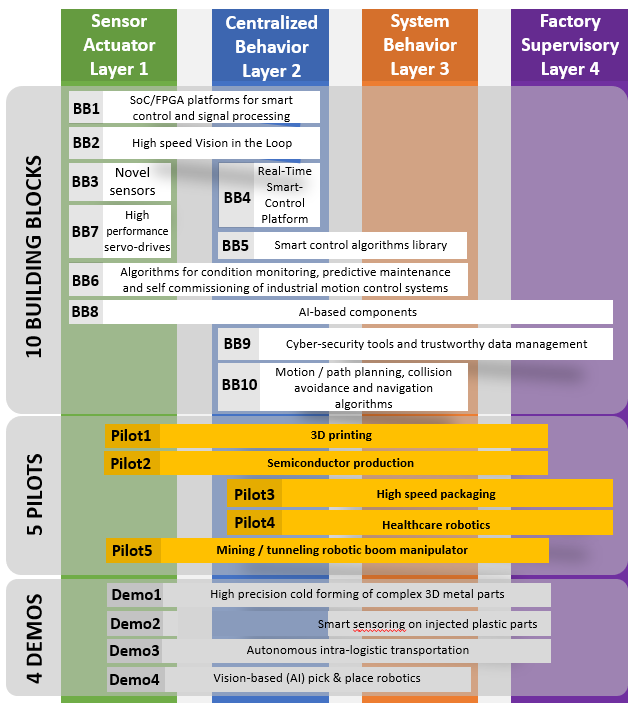
Building blocks
The “digital transformation” is boosted by the “data and analysis hunger” of social media platforms and the online sales business. With growing maturity and the economy of scale of the involved HW and SW, a trend has been initiated to connect more “information” to this infrastructure. The word “information” was chosen deliberately. Equipment can generate Gigabytes of data but can only ‘interpret’ a limited set in real-time. In I-MECH we introduced a reference framework to deal with this challenge through a layered approach that we called “Master the behaviour of controlled interaction with physics”. It helped to explain that tangible Building Blocks (BBs) often require ‘components’ at different layers. In IMOCO4.E the following BBs has identified:
Building block 1: SoC/FPGA platforms for smart control and signal processing
Building block 2: High speed Vision in the Loop
Building block 3: Novel sensors (new type of sensors, wireless communications, self powered, low-powered)
Building block 4: Real-Time Smart-Control Platform
Building block 5: Smart control algorithms library
Building block 6: Algorithms for condition monitoring, predictive maintenance and self commissioning of industrial motion control systems
Building block 7: High performance servo-drives
Building block 8: AI-based components
Building block 9: Cyber-security tools and trustworthy data management
Building block 10: Motion / path planning, collision avoidance and navigation algorithms
See the VIDEOS page for more information on building blocks!